一. 图像边缘
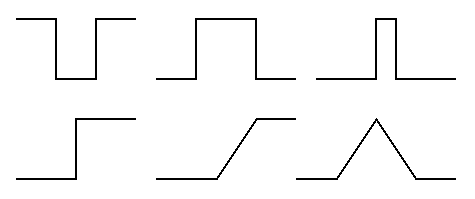
图像边缘,(不严谨的说)通常就是指图像中灰度在一个小范围内有一个剧烈变化的部分。因为不同的实际需求对边缘的定义很可能并不相同,所以我们也不必纠结于细节。下面有一些边缘形状的的例子,其中的高低可以看作是灰度值的大小:
边缘通常比图像中的其他特征(颜色,纹理)包含更多的有用信息,因此边缘检测一直是很重要的课题。尤其是如何把边缘同其他特征(纹理,噪声)区分开来,是很关键的。对于图像中对象的识别和定位,边缘检测是一个基本的工具。它也是图像分割过程的一部分。
通常边缘检测都会首先对噪声进行处理。噪声一般是随机的,但有两种类型的噪声在图像分析中常常使用:
- 信号无关的,一般可用带有特定平均值和标准偏差的概率分布来表示,比如高斯分布。
- 信号相关的,图像中每一点噪声的大小为这一点灰阶值的函数。
边缘和噪声像素都具有的特点是比周围的像素有明显的灰阶变化。而边缘像素互相连接,构成等高线。可以据此区分噪声和边缘像素。
二. 检测方法
边缘检测的方法很多,新方法也在不断地涌现出来。一些旧方法已经不太常用了,例如:基于直方图分析,常用的有一下几种:
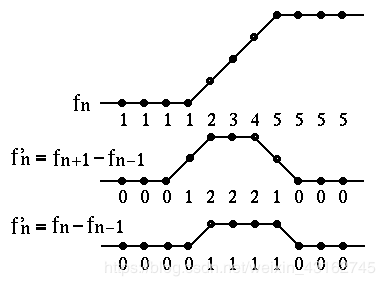
1.一阶微分算子
一阶微分算子一般是通过梯度来进行边缘检测,下图就是利用梯度(一阶导数)检测的例子:
这类算子包括:Roberts 算子,Prewitt 算子,Sobel 算子,Kirsch 算子等。
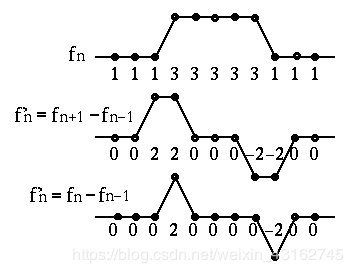
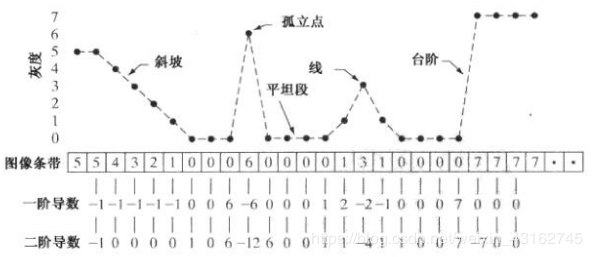
2.二阶微分算子
二阶微分的特性是,在导数的极值点为零,极值点两侧为异号。由于其对细微的边缘也能很好的响应,所以应用广泛。但其缺点也很明显,就是对噪声的响应也会很强烈。
这类算法包括:Laplacian 算子,LoG 算子,Canny 算子等。
3.其他算法
基于小波的边缘检测算法等等。
另外,也可以按如下方式分类:
- 导数算子
- 模版匹配
- 边缘的数学建模,当然也要尽量把噪声因素考虑进去
三. 参考资料
转载请注明来源: https://xudeyu.github.io/2019/03/31/edge-detection.html 欢迎对文章中的引用来源进行考证,欢迎指出任何有错误或不够清晰的表达。可以在下面评论区评论(可能需要在能访问 disqus 服务的网络),也可以邮件至 。
简约而不简单

写的还凑合,赏点零花钱

写的还凑合,赏几个铜板